1.任务
分步构建卷积神经网络并进行部署应用。
2.Convolutional Neural Networks: Step by Step
符号说明: - 上标
- 上标
表示来自第 个示例的对象。 - 示例:
是第 个训练示例输入。
- 示例:
- 下标
表示向量的第 个条目。 - 示例:
表示第 层激活中的第 个条目,假设这是一个全连接(FC)层。
- 示例:
、 和 分别表示给定层的高度、宽度和通道数。如果你想引用特定的层 ,你也可以写成 、 、 。 、 和 分别表示前一层的高度、宽度和通道数。如果引用特定层 ,这也可以表示为 、 、 。
卷积神经网络的构建块要实现的每个函数的说明步骤:
- 卷积函数,包括:
- 零填充
- 卷积窗口
- 卷积前向传播
- 卷积反向传播(可选)
- 池化函数,包括:
- 池化前向传播
- 创建掩码
- 分配值
- 池化反向传播(可选)
2.1导入库
1 | import numpy as np |
2.2构建网络块
2.2.1Zero-Padding(零填充)
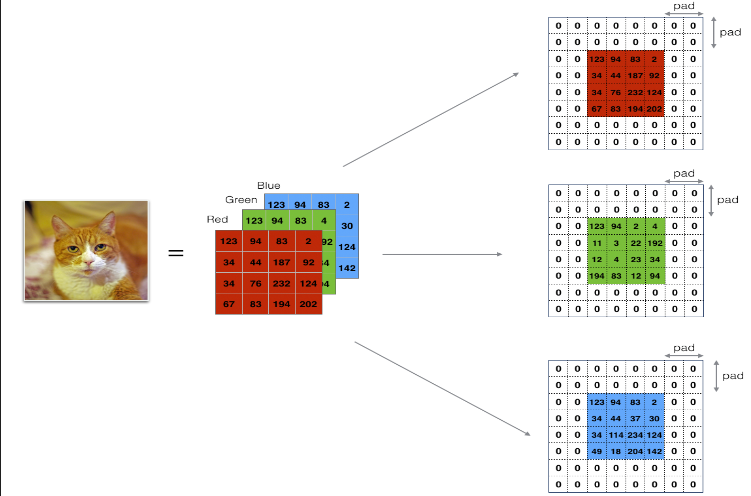
主要好处如下:
它允许你使用卷积层而不必缩小体积的高度和宽度。这对于构建更深的网络非常重要,因为否则在进入更深层次时,高度/宽度会缩小。一个重要的特例是“相同”卷积,在这种卷积中,经过一层处理后,高度/宽度被完全保留。
它帮助我们保留了图像边缘处更多的信息。如果没有填充,图像边缘的像素会对下一层的很少数值产生影响。
代码:
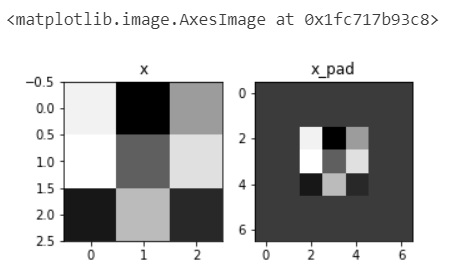
1 | # 评分函数:zero_pad |
部署:
1 | np.random.seed(1) |
输出:
1 | x.shape = (4, 3, 3, 2) |
2.2.2Convolve window(卷积窗口)
代码:
1 | # 评分函数:conv_single_step |
部署:
1 | np.random.seed(1) |
输出:
1 | Z = -6.999089450680221 |
2.2.3Convolution forward(卷积前向传播)
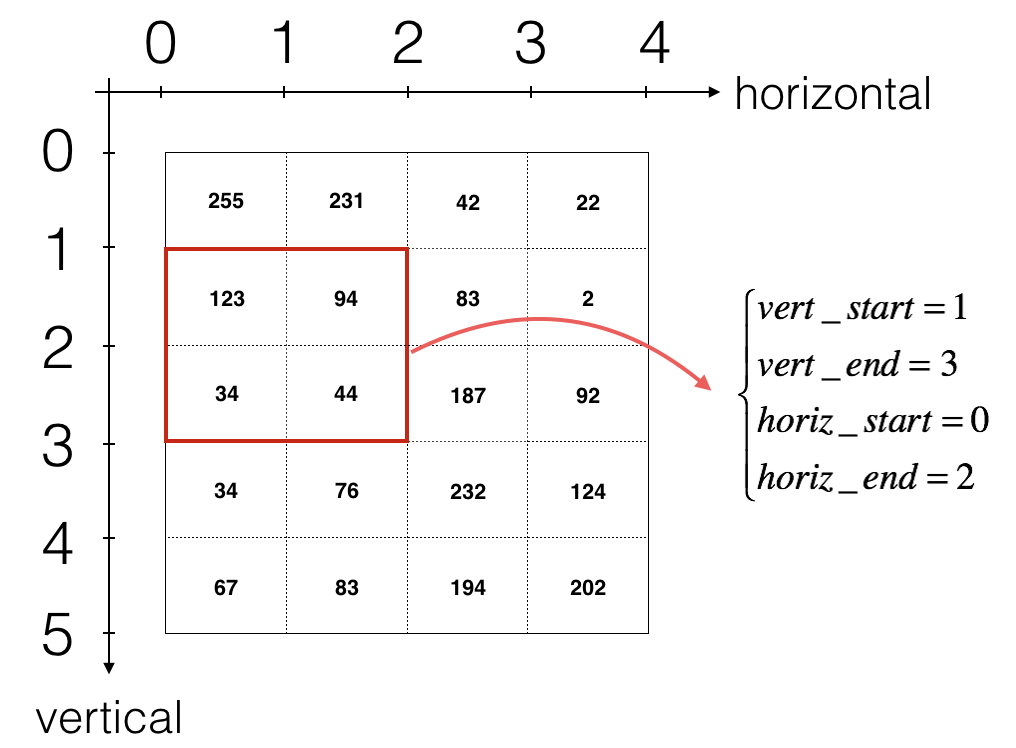
上图只显示单个通道,使用垂直和水平起止(使用 2x2 滤波器)定义切片
卷积的输出形状与输入形状相关的公式是:
1 | # 评分函数:conv_forward |
部署:
1 | #生成样例数据 |
输出:
1 | Z's mean = 0.048995203528855794 |
2.2.4Convolution backward(卷积反向传播)
- 计算dA
这是计算相对于某一特定滤波器
其中
在代码中,放在适当的 for 循环内,这个公式转化为: 1
da_prev_pad[vert_start:vert_end, horiz_start:horiz_end, :] += W[:,:,:,c] * dZ[i, h, w, c]
- 计算dW
这是计算相对于损失的
在代码中,放在适当的 for 循环内,这个公式转化为: 1
dW[:,:,:,c] += a_slice * dZ[i, h, w, c]
- 计算db
这是计算相对于某一特定滤波器
在代码中,放在适当的 for 循环内,这个公式转化为: 1
db[:,:,:,c] += dZ[i, h, w, c]
代码:
1 | def conv_backward(dZ, cache): |
部署:
1 | np.random.seed(1) |
输出:
1 | dA_mean = 1.4524377775388075 |
2.2.5Pooling forward(池化前向传播)
由于没有填充,将池化的输出形状与输入形状绑定的公式是:
$$ {. $$ 代码:
1 | # 评分函数:pool_forward |
部署:
1 | np.random.seed(1) |
输出:
1 | mode = max |
2.2.6Pooling backward(池化反向传播)
在跳入池化层的反向传播之前,你将构建一个名为
create_mask_from_window() 的辅助函数,它执行以下操作:
如你所见,这个函数创建了一个“掩码”矩阵,用来追踪矩阵中的最大值位置。真(1)表示 X 中最大值的位置,其它条目为假(0)。你稍后会看到,平均池化的反向传播过程与此类似,但使用的掩码不同。
1.辅助函数代码:
1 | def create_mask_from_window(x): |
部署:
1 | np.random.seed(1) |
输出:
1 | x = [[ 1.62434536 -0.61175641 -0.52817175] |
2.反向传播 backward pass 算法代码:
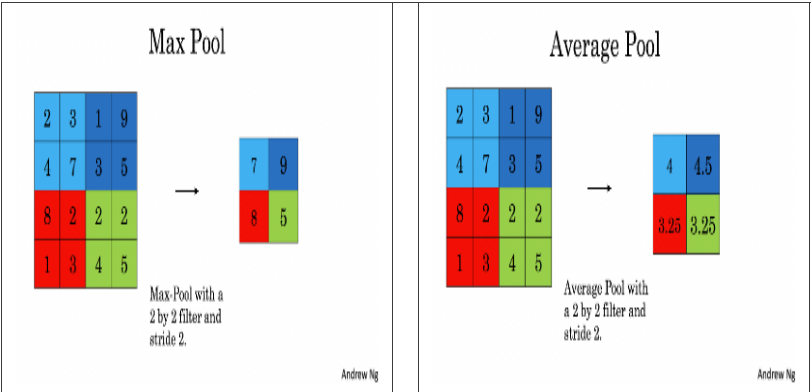
在最大池化中,对于每个输入窗口,所有对输出的“影响”都来自单个输入值——最大值。在平均池化中,输入窗口的每个元素对输出都有相同的影响。因此,为了实现反向传播,你现在将实现一个反映这一点的辅助函数。
例如,如果我们在前向传播中使用 2x2
滤波器进行平均池化,那么你在反向传播中使用的掩码将看起来像:
这意味着
1 | def distribute_value(dz, shape): |
部署:
1 | a = distribute_value(2, (2,2)) |
输出:
1 | distributed value = [[0.5 0.5] |
- 3.反向传播 Pooling backward 算法代码:
1 | def pool_backward(dA, cache, mode = "max"): |
部署:
1 | np.random.seed(1) |
输出:
1 | mode = max |
3.Convolutional Neural Networks: Application
https://github.com/dennybritz/cnn-text-classification-tf